| 基于STM32的智能循迹避障小车实验(舵机旋转部分) | 您所在的位置:网站首页 › 超声波 避障 › 基于STM32的智能循迹避障小车实验(舵机旋转部分) |
基于STM32的智能循迹避障小车实验(舵机旋转部分)
|
接上一部分基于STM32的智能循迹避障小车实验(循迹部分) 这部分我们来完成载着超声波模块的舵机部分 实验所用器件及其介绍这部分使用了舵机SG90,它长这样:
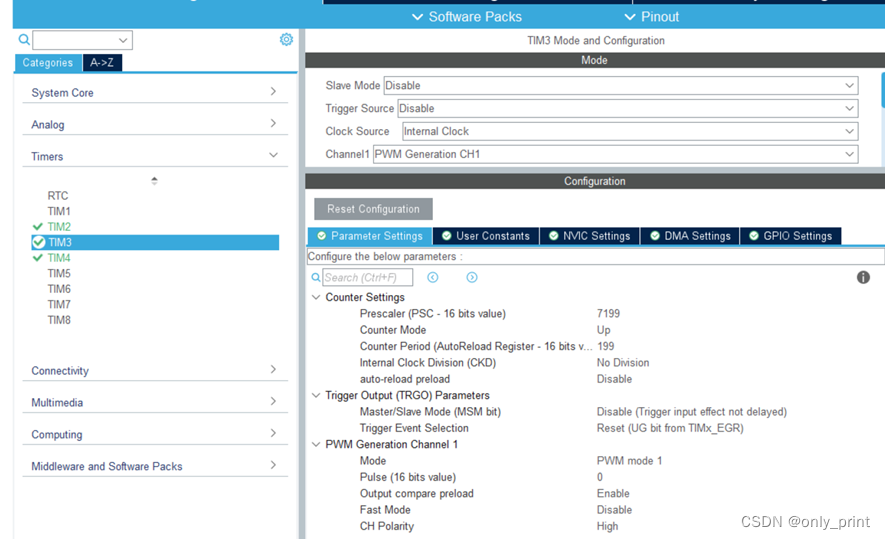
图1舵机模块实物图 它一共引出来三条线:分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),也就是地线、电源线和信号线。 工作原理:舵机通过接收PWM信号,使其进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。即给舵机一个特定的PWM信号,舵机旋转到特定角度。 PWM相关知识可以阅读我之前写过的PWM信号控制呼吸灯(使用通用定时器实现呼吸灯),这里不再进行解读。 舵机的控制,需要一个20ms的时基脉冲,控制高电平时间为0.5ms~2.5ms范围内即可控制舵机在0 ~ 180°转动。 t=0.5ms 舵机转动到0° t=1.0ms 舵机转动到45° t=1.5ms 舵机转动到90° t=2.0ms 舵机转动到135° t=2.5ms 舵机转动到180° 表格 1舵机高电平持续时间对应的舵机旋转角度 明白了舵机的工作原理后,就可以通过程序来控制舵机转动了。 程序控制CobeMX设置 这里还是使用之前的程序,打开之前的CobeMX,直接在其上继续设置。 这次我们选择TIM3的通道1输出PWM波,TIM3的通道1对应的是PA6,所以我们将舵机的信号线(黄色线)接到PA6,具体设置如图
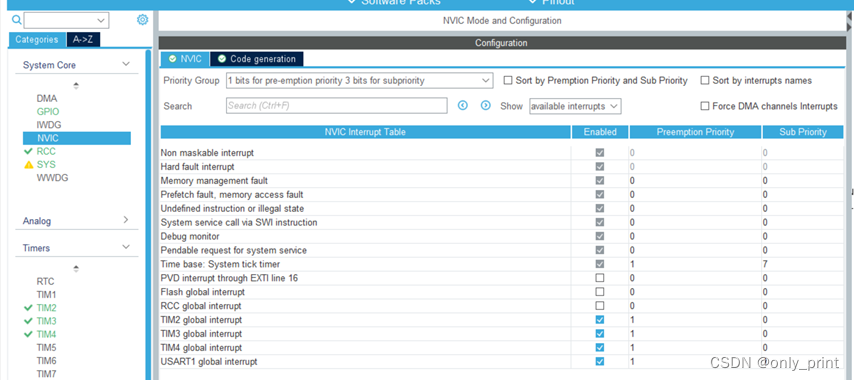
图2 TIM3设置 这里主要注意预分频系数(Prescaler)为7199+1 = 7200,计数周期(Counter Period)为199+1 = 200次,通过这两个设置,让一个PWM脉冲周期为200ms。之后我们只需要改变高电平持续时间即可改变舵机旋转角度,这块配置完成后再在NVIC设置中打开TIM3的时钟,设置它的主优先级为1,次优先级为0,具体设置如图(图中TIM2在之前第一节控制电机时已经打开,后面的TIM4在之后的超声波部分也会打开):
这些设置完成后就可以生成代码了。 代码实现 这里我们首先得先在主函数中开启TIM3的中断, HAL_TIM_Base_Start_IT(&htim3); // 这是开启TIM3的中断 HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_1); // 在中断模式下开始 PWM 信号生成。(前提要先开启对应定时器中断)打开函数中断后重新实现中断回调函数(回调函数可以定义在tim.c文件中): 实现回调函数之前要先定义两个变量,然后再实现回调函数 uint16_t PulseWidth = 0; // 脉宽 uint8_t dirInc = 1; // 脉宽变化方向 1 = 递增,0 = 递减 // 重新实现定时器的回调函数 /* TIM3 init function */ void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim) { // 舵机的回调函数,使舵机转向 if(htim->Instance == TIM3) // 判断是否是TIM3引起的中断 { if(dirInc == 1) // 脉宽变化方向 { PulseWidth ++; // 调整脉宽宽度 if(PulseWidth>=24) // 变化范围是0—25 { PulseWidth = 24; dirInc = 0; // 改变脉宽变化方向 } } if(dirInc == 0) { PulseWidth --; if(PulseWidth |

【本文地址】